
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
publications
A Tunable Magnet-Based Tactile Sensor Framework
Published in 2020 IEEE SENSORS, 2020
This paper presents a novel tunable magnet-based tactile sensor framework that leverages magnetic field sensing for tactile perception. The system offers adjustable sensitivity and robust performance for robotic and biomedical sensing applications. 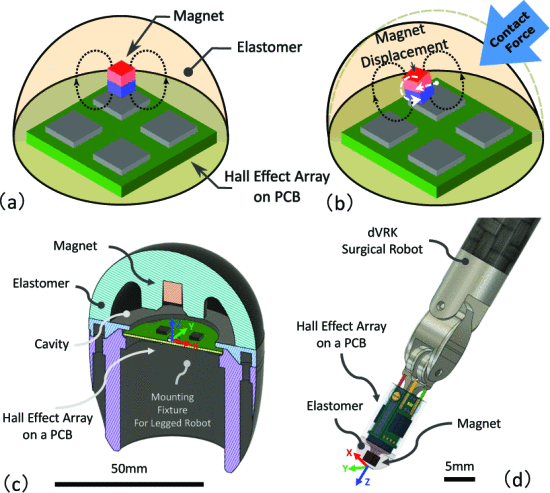
Recommended citation: E. Harber, E. Schindewolf, V. Webster-Wood, H. Choset, and L. Li. (2020). "A Tunable Magnet-Based Tactile Sensor Framework." 2020 IEEE SENSORS. pp. 1-4.
Download Paper
Toward Robotically Automated Femoral Vascular Access
Published in 2021 International Symposium on Medical Robotics (ISMR), 2021
This paper presents research toward developing a robotic system for automated femoral vascular access, addressing critical challenges in emergency medicine and surgical procedures through advanced robotics, computer vision, and medical device integration. 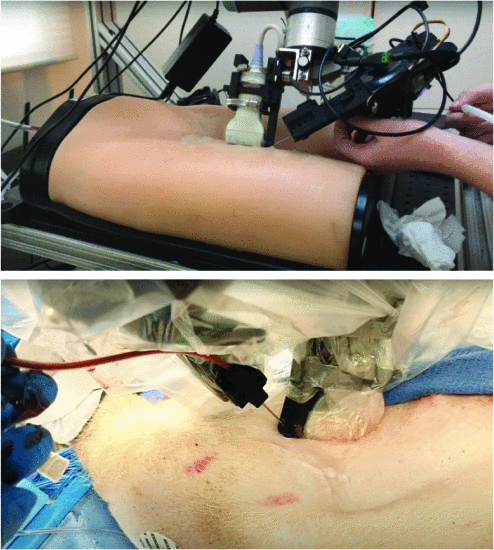
Recommended citation: N. Zevallos*, E. Harber*, Abhimanyu, K. Patel, Y. Gu, K. Sladick, F. Guyette, L. Weiss, M. R. Pinsky, H. Gomez, J. Galeotti, and H. Choset. (2021). "Toward Robotically Automated Femoral Vascular Access." 2021 International Symposium on Medical Robotics (ISMR). pp. 1-7.
Download Paper
Design of a Biomimetic Tactile Sensor for Material Classification
Published in 2022 International Conference on Robotics and Automation (ICRA), 2022
This paper presents the design of a biomimetic tactile sensor inspired by biological sensory systems, capable of classifying different materials through tactile interaction. The sensor demonstrates improved material discrimination capabilities compared to traditional approaches. 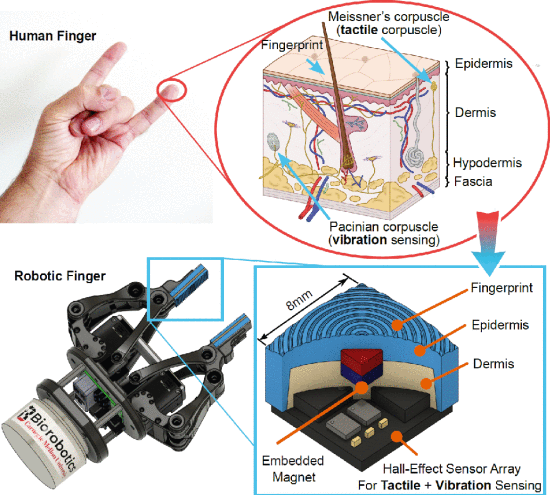
Recommended citation: K. Dai, X. Wang, A. M. Rojas, E. Harber, Y. Tian, N. Paiva, J. Gnehm, E. Schindewolf, H. Choset, V. A. Webster-Wood, and L. Li. (2022). "Design of a Biomimetic Tactile Sensor for Material Classification." 2022 International Conference on Robotics and Automation (ICRA). pp. 10774-10780.
Download Paper
Stiffness Mapping of Deformable Objects through Supervised Embedding and Gaussian Process Regression
Published in Carnegie Mellon University, 2022
This Master's thesis develops a novel approach for mapping the stiffness properties of deformable objects by combining supervised embedding techniques with Gaussian process regression, enabling robots to understand and predict the mechanical properties of soft materials through tactile interaction. 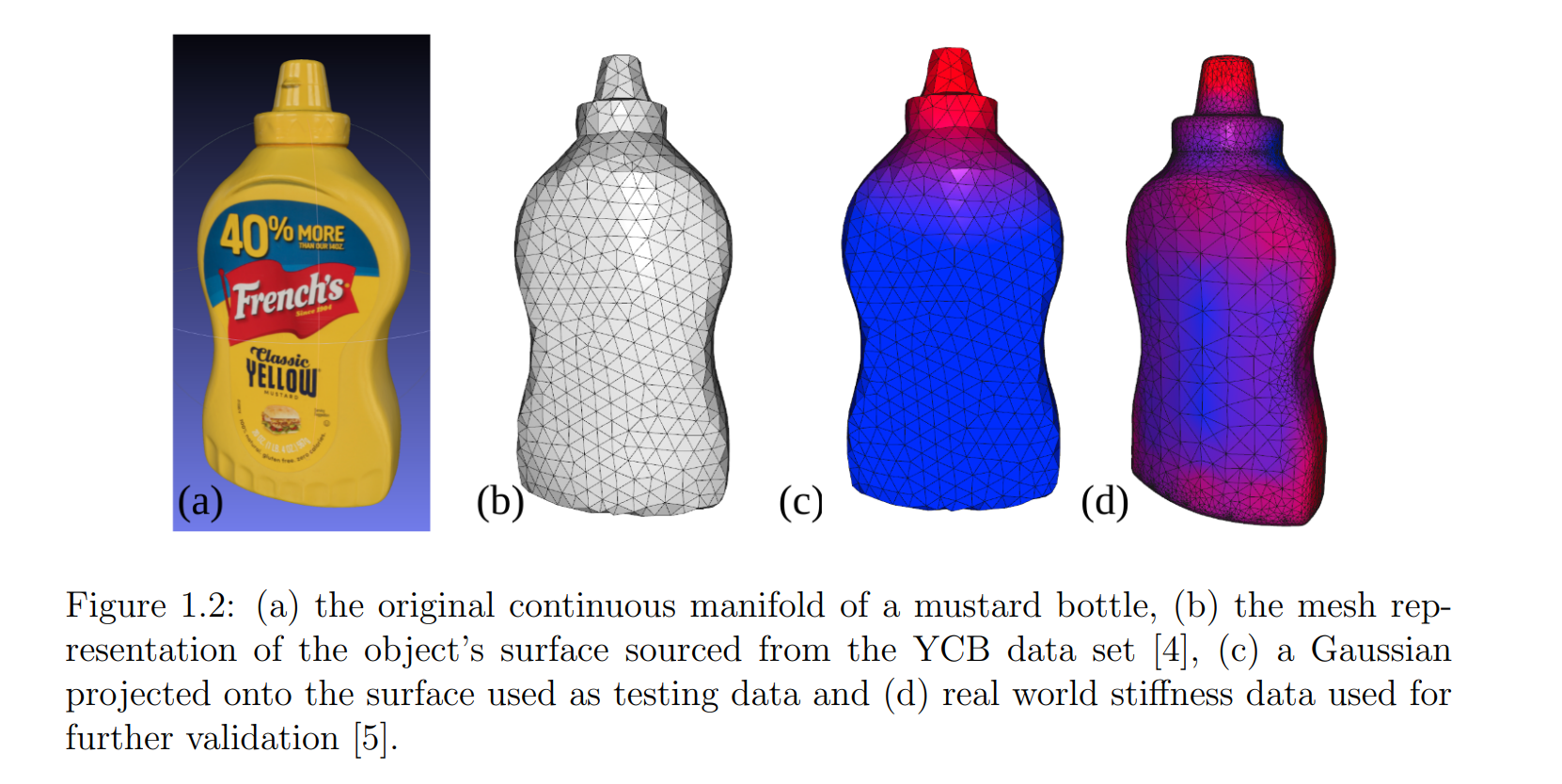
Recommended citation: E. Harber. (2022). "Stiffness Mapping of Deformable Objects through Supervised Embedding and Gaussian Process Regression." Master's thesis, Carnegie Mellon University, Pittsburgh, PA.
Download Paper
Sensing Device
Published in World Intellectual Property Organization (WIPO), 2022
This international patent describes a novel sensing device technology with applications in tactile sensing and robotic perception. The patent represents the intellectual property protection for innovative sensor design and manufacturing approaches developed through collaborative research.
Recommended citation: L. Li, E. Schindewolf, E. Harber, and H. Choset. (2022). "Sensing Device." Patent WO2022093771A1, World Intellectual Property Organization.
Download Paper
NeuroReality™: A Data Distribution Service-based Inter-Process Communication Middleware
Published in 2024 IEEE Conference on Telepresence, 2024
This paper introduces NeuroReality™, a DDS-based publish-subscribe middleware designed for distributed real-time systems in telepresence and teleoperation applications, offering low-latency, high reliability, and high throughput communication that outperforms traditional server-client architectures.
Recommended citation: S. Asjad, E. Harber, V. Santos, and D. Tyler. (2024). "NeuroReality™: A Data Distribution Service-based Inter-Process Communication Middleware." 2024 IEEE Conference on Telepresence. pp. 168-171.
Download Paper
Optistrain: A vision- and microfluidics-based tactile sensor with high spatial and temporal resolution
Published in IEEE World Haptics Conference, 2025
This paper presents Optistrain, a novel tactile sensor that combines vision and microfluidics technologies to achieve high spatial and temporal resolution for haptic sensing applications.
Recommended citation: E. Harber, C. P. Johnson, A. Liebman, A. Psychoyos, M. Whidby, S.-M. Kang, J. Peñaloza, A. T. Bender, J. D. Posner, and V. J. Santos. (2025). "Optistrain: A vision- and microfluidics-based tactile sensor with high spatial and temporal resolution." IEEE World Haptics Conference. Work in Progress.
talks
Storytelling Through Characters at Disney Parks
Published:
During my 2023 internship at Disney Research, I contributed to the development of robotics technology for the Judy Hopps character featured in this SXSW presentation. The talk showcases how Disney Parks uses advanced robotics and storytelling to create immersive character experiences for guests. Josh D’Amaro, Morgan Pope and Tony Dohi did such a great job presenting on everything going on at Disney, including this project. Take a look!
Precision in Dynamic Rope Manipulation: The Advantage of Force Feedback
Published:
Precision in Dynamic Rope Manipulation: The Advantage of Force Feedback
Published:
OptiStrain: A vision- and microfluidics-based tactile sensor with high spatial and temporal resolution
Published:
The power of touch in human-robot systems for a connected world
Published:
My PhD Advisor, Veronica Santos, presented at the AI for Good conference on the teleoperated system I helped design. The full talk video will be available soon! In the meantime, here’s a preview of the system she showcased:
teaching
Robotic Kinematics and Dynamics Teaching Assistant (TA)
Undergraduate course, Carnegie Mellon Univeristy, Robotics Institute, 2018
Dynamics of Particle and Rigid Bodies Teaching Assistant (TA)
Undergraduate Course, University of California, Los Angeles, 2022